手 機:188-4051-2327
聯系郵箱:ddnyjd@163.com
郵政編碼:118009
網 址:m.91ylx.com
公司地址:丹東市臨港產業園區儀表園文慶路70-30號
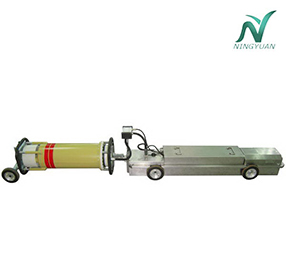
X射線管道爬行器基本原理
X射線管道爬行器基本原理主要由機械行走部分、射線發生部分、定位傳感器、邏輯控制器、電源及管道外部的遙控定位用指令源等組成,它是一種自動化射線產生裝置,由機械行走部分帶動射線發生裝置在管道內部行走,在管道外對接焊縫處貼X射線專用膠片和標記,通過管道外部遙控裝置的配合,可以在管道內定位及曝光,從而對管道對接環焊縫進行X光透照,實現管道對接環焊縫的無損檢測,另外,還可以通過遙控控制爬行器的前進、后退、休息等動作。
控制器(電路)部分:通過研制γ射線爬行器的經驗,繼續采用原可編程控制器(FX0系列20點繼電器輸出型),具有體積小、供電方便、可靠性高的特點。電路布線方面盡量簡單化、以方便維護,就近安排強電部件,將強電與弱電分離,以免造成對控制系統的干擾[2]。電動車供電:考慮到控制器供電方便和電動機供電時間的要求,電動車電源采用24V直流電源。使用一套90%充足電的38安時電池,行走速度18米/分鐘,平均工作電流4安培計算,可以連續爬行約7.6小時(80%放電容量),爬行距離8208米。爬行距離遠是一項重要特色,這樣可以適應一臺爬行器工作在幾個工作面輪流工作和“二接一” 間隔檢測的施工技術要求。
聲明:本文僅供交流學習,版權歸屬原作者,部分文章推送時未能及時與原作者取得聯系,若來源標注錯誤或侵犯到您的權益,煩請告知,我們將立即刪除,謝謝!!!
 |  |
| 官方微信 | 官方手機網 |



